3600度旋转舵机 SD-AS-MX3600
3600度旋转舵机 SD-AS-MX3600

应用范围
机器人、机械臂、机械手、云台控制,阀门控制,生产线机器人、摄像机云台控制等
产品特性
- 适用于舵机控制器、航模无线遥控器及模拟电压控制
- 合金齿轮大功率电机高扭矩输出
- 铝合金减速箱体超轻重量
- 安装简便,坚固耐用
应用范围
- 大型机器人的手臂关节及腿部关节重负荷运动控制
- 工业自动化生产线机械手控制
- 阀门角度的精确控制
- 大型摄像机云台遥控
- 各种需要大扭矩角度控制的场合
额定参数
| 项目 | 技术参数 |
|---|---|
| 额定电压 | 12V |
| 空载电流 | <500mA(限流值:5A,建议使用大于5A的开关电源或电池) |
| 极限角度 | ±1800°或0°~3600°(MAX) 舵机有电子限位调节 |
| 控制方式 | RC模式 1ms脉冲模式:1ms 2ms脉冲模式:0.5ms 模拟电压模式 0V~5V输入电压(0.22V对应0°,4.78V对应3600°) |
| 材质 | 齿轮与轴:合金钢;齿轮箱体:铸铝 |
| 重量 | 1110g |
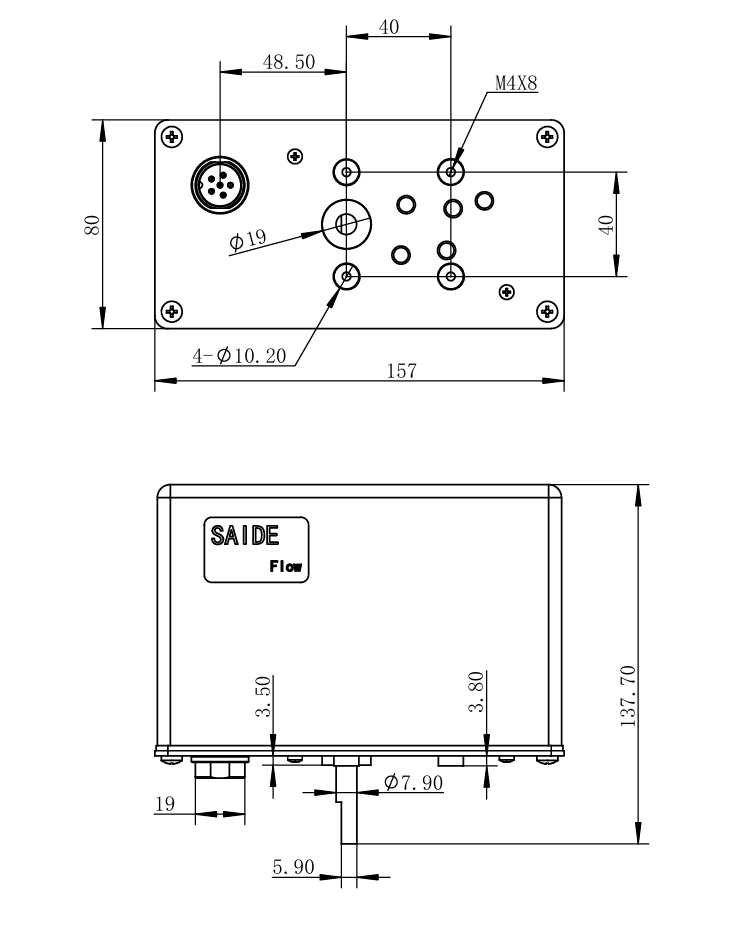
| 外形尺寸 | 135mm * 156mm * 79mm |
| 机械寿命 | >1,000,000次/满负荷(保守值) |
极限参数
| 项目 | 技术参数 |
|---|---|
| 极限电压 | 11V~30V/DC(MAX) |
| 限流值 | 5A±0.2A(MAX) |
| 工作角度 | ±1800°或0°~3600°(MAX) |
| 控制方式 | RC模式 -模拟电压模式 0V~5V输入电压(0.22V对应0°,4.78V对应300°) |
| 重量 | 550g~600g |
型号规格
| 型号 | 启动扭矩 | 保持扭矩 | 额定转速(24V电源) |
|---|---|---|---|
| SD-AS-MX3600 | 380kg.cm max | 340kg.cm max | 0.5s/60° |
接线与控制方式说明
-
电源线:需按舵机标示的电源极性接线。
-
指示灯:闪烁表示舵机工作正常。
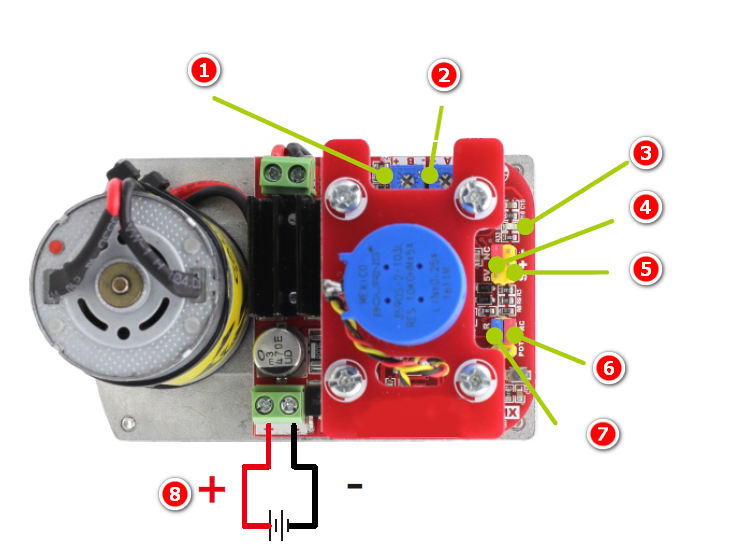
| 序号 | 功能说明 |
|---|---|
| ① | 角度范围调节(顺时针增加角度,反之减小) |
| ② | 灵敏度调节(顺时针增加角度,反之减小) |
| ③ | 指示灯 |
| ④ | 模拟电压输入 |
| ⑤ | RC信号输入 |
| ⑥ | 模式设置(模拟量/脉冲) |
| ⑦ | 脉宽模式设置(1ms/2ms) |
| ⑧ | 直流电源(12V~24V DC) |
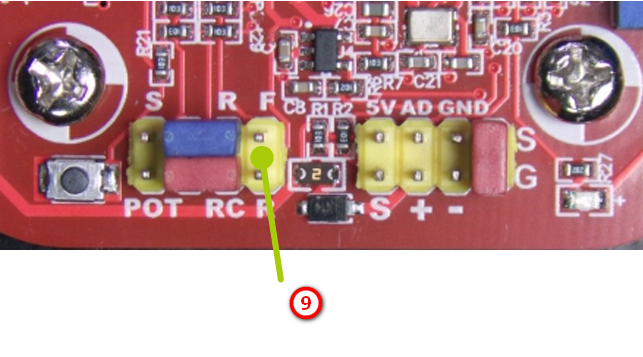
| ⑨ | 修改舵机默认旋转方向:短接或断开(cw 或ccw) |
警告:电源输入端反接会直接烧毁舵机,接线时请注意检查!
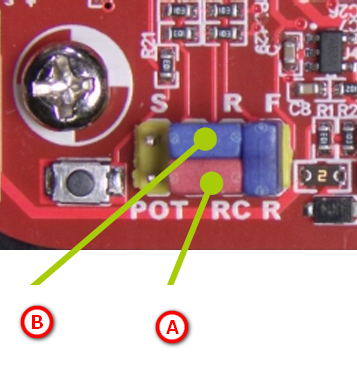
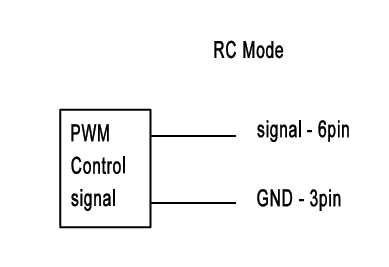
舵机信号输入方式(RC模式)
| 适应大多数航模遥控器的“1ms”脉冲宽度模式 | 适应多路舵机控制器的“2ms”脉冲宽度模式(默认) |
|---|---|
 |
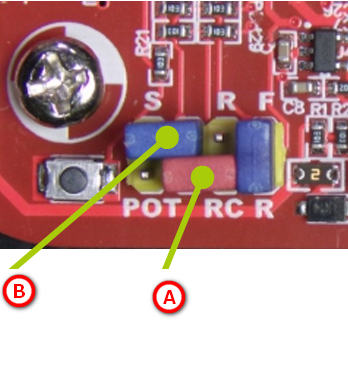 |
| A. 跳线帽设置在“RC”位置。 | A. 跳线帽设置在“RC”位置。 |
| B. 跳线帽设置在“R”位置。 | B. 跳线帽设置在“S”位置。 |
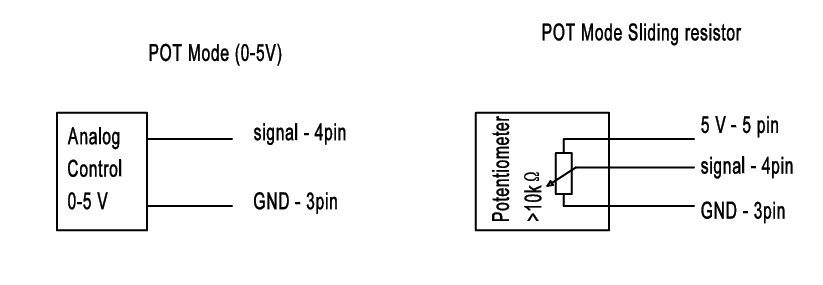
电压与电位器输入方式(POT模式)
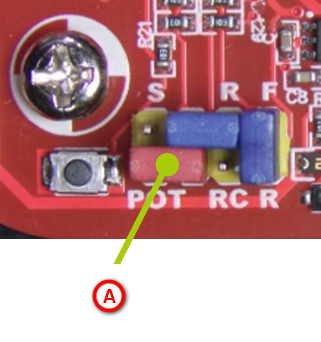
适应手动电位器控制或有线控制模式:
A. 跳线帽设置在“POT”位置。
警告:
舵机采用0-5V控制时,意外断电,再次供电后,舵机会自动恢复到绝对零位(非停留在当前位置),但采用RC模式控制,舵机可以记住当前位置,再次供电,会停留在当前位置。
POT模式下,电位器选择:10k、50k、100k等阻值大于10k的线性电位器。
电源反接会直接烧毁舵机,请注意检查极性。
由于齿轮箱新齿轮的摩擦,舵机的运转可能会产生一些声音,这属于正常现象,请查看相关视频来判定这个声音是否可接受。
当舵机旋没有转到位时,被大于转矩的负载阻挡,导致舵机堵转,这是危险的行为,短时间是可接受的,但长时间电机会持续带电,发热,最终会烧毁舵机。
外形尺寸:(单位:mm)
接线定义:
舵机内部接线,见下图,外部信号控制键RC模式和POT模式说明:

实物图片
 |
 |
 |
|---|---|---|
 |
 |
 |