3600-degree rotating servo SD-AS-MX3600
3600-degree rotating servo SD-AS-MX3600

Applications
Robotics, robotic arms, manipulators, gimbal control, valve control, production line robots, camera gimbal control, etc.
Product Features
- Compatible with servo controllers, RC model wireless remote controls, and analog voltage control
- High-torque output with alloy gears and high-power motor
- Ultra-lightweight aluminum alloy gearbox
- Easy installation, robust and durable
Application Scope
- Heavy-duty motion control for large robotic arm and leg joints
- Industrial automation production line manipulator control
- Precise valve angle control
- Remote control for large camera gimbals
- Various applications requiring high-torque angle control
Rated Parameters
| Item | Technical Parameters |
|---|---|
| Rated Voltage | 12V |
| No-Load Current | <500mA (Current limit: 5A, recommended to use a switching power supply or battery >5A) |
| Maximum Angle | ±1800° or 0°~3600° (MAX) with electronic limit adjustment |
| Control Method | RC Mode 1ms pulse mode: 1ms 2ms pulse mode: 0.5ms Analog Voltage Mode 0V~5V input voltage (0.22V corresponds to 0°, 4.78V corresponds to 360°) |
| Material | Gears and shaft: alloy steel; Gearbox: cast aluminum |
| Weight | 1110g |
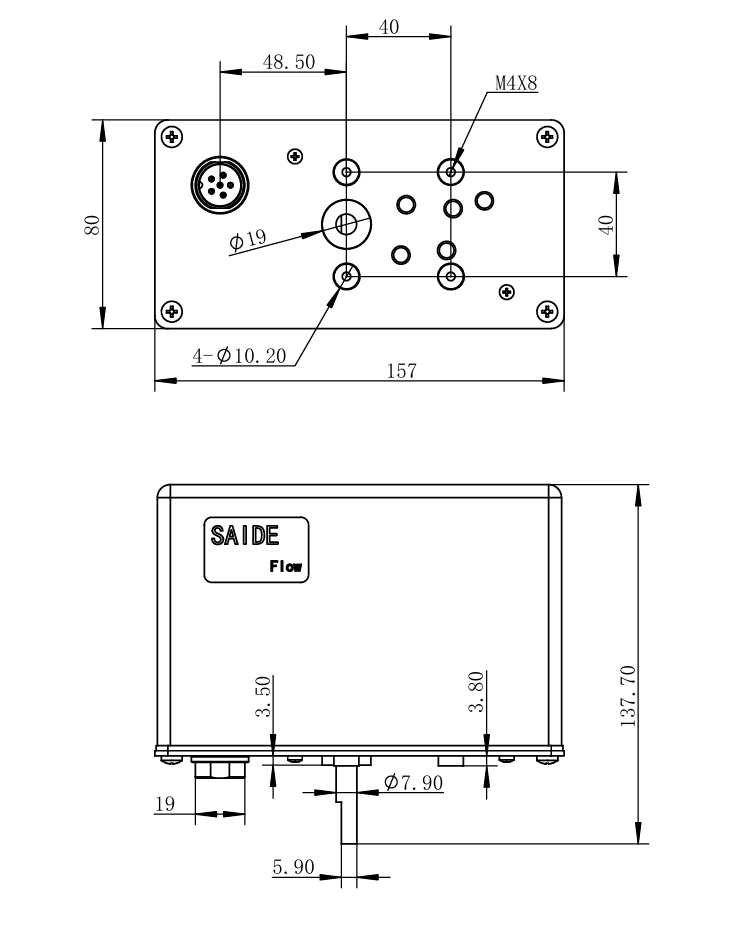
| Dimensions | 135mm * 156mm * 79mm |
| Mechanical Life | >1,000,000 cycles/full load (conservative value) |
Extreme Parameters
| Item | Technical Parameters |
|---|---|
| Extreme Voltage | 11V~30V/DC (MAX) |
| Current Limit | 5A±0.2A (MAX) |
| Operating Angle | ±1800° or 0°~3600° (MAX) |
| Control Method | RC Mode 1ms pulse mode: 1ms 2ms pulse mode: 0.5ms Analog Voltage Mode 0V~5V input voltage (0.22V corresponds to 0°, 4.78V corresponds to 300°) |
| Weight | 550g~600g |
Model Specifications
| Model | Starting Torque | Holding Torque | Rated Speed (24V Power) |
|---|---|---|---|
| SD-AS-MX3600 | 380kg.cm max | 340kg.cm max | 0.5s/60° |
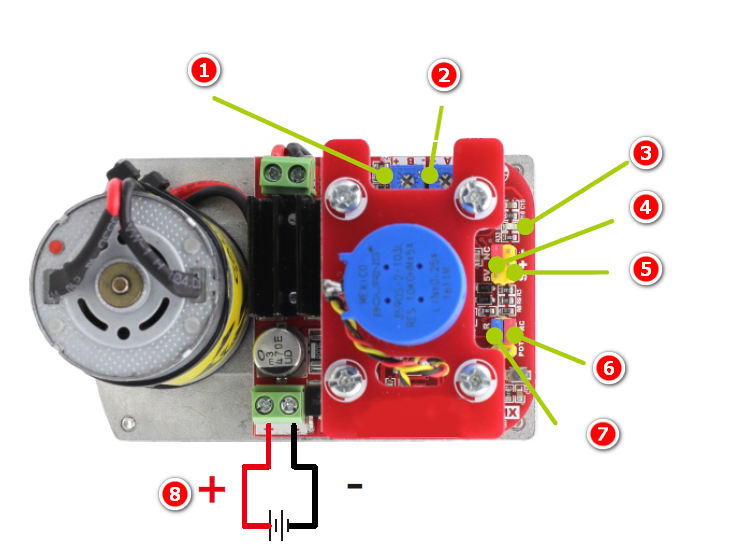
Wiring and Control Method Description
- Power Cable: Connect according to the polarity indicated on the servo.
- Indicator Light: Flashing indicates normal servo operation.
 |
 |
|---|
| No. | Function Description |
|---|---|
| ① | Angle range adjustment (clockwise to increase, counterclockwise to decrease) |
| ② | Sensitivity adjustment (clockwise to increase, counterclockwise to decrease) |
| ③ | Indicator light |
| ④ | Analog voltage input |
| ⑤ | RC signal input |
| ⑥ | Mode setting (analog/pulse) |
| ⑦ | Pulse width mode setting (1ms/2ms) |
| ⑧ | DC power supply (12V~24V DC) |
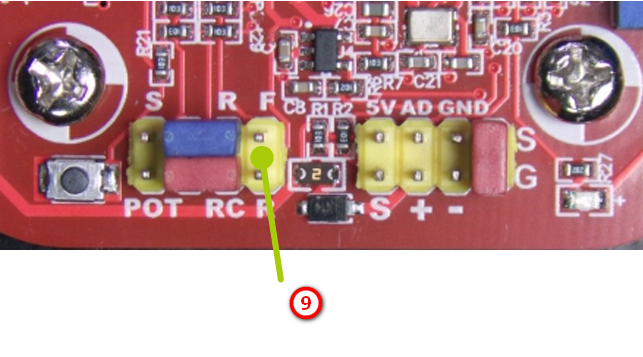
| ⑨ | Modify default servo rotation direction: short or open (CW or CCW) |
Warning: Reverse polarity connection of the power input will directly burn out the servo. Please check the wiring carefully!
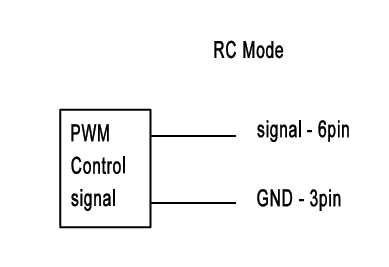
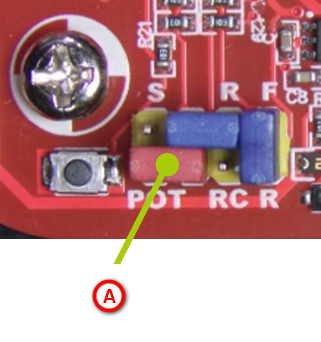
Servo Signal Input Methods (RC Mode)
| Compatible with "1ms" pulse width mode for most RC remote controls | Compatible with "2ms" pulse width mode for multi-channel servo controllers (default) |
|---|---|
 |
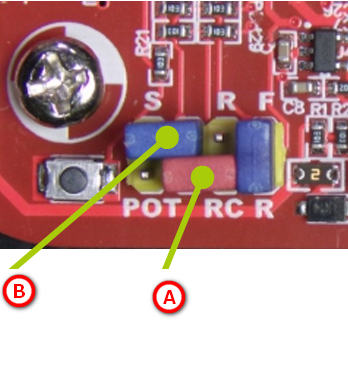 |
| A. Jumper cap set to "RC" position. | A. Jumper cap set to "RC" position. |
| B. Jumper cap set to "R" position. | B. Jumper cap set to "S" position. |
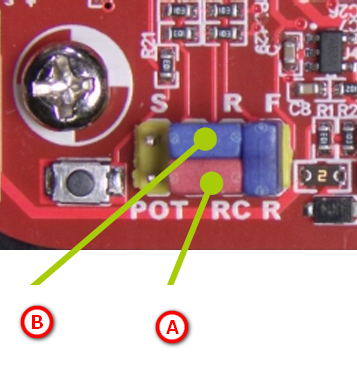
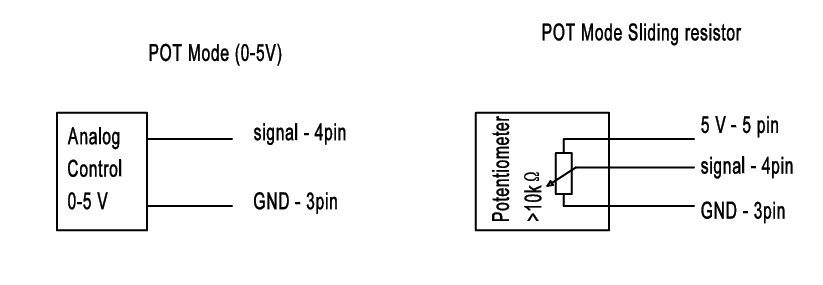
Voltage and Potentiometer Input Method (POT Mode)
Compatible with manual potentiometer control or wired control mode:
A. Jumper cap set to "POT" position.
Warning:
When the servo is controlled using 0-5V, an unexpected power outage will cause the servo to automatically return to the absolute zero position (it will not remain at the current position) upon repowering. However, when controlled in RC mode, the servo can remember its current position and will stay there after repowering.
In POT mode, use linear potentiometers with resistance values greater than 10k, such as 10k, 50k, or 100k.
Reverse power connection will directly burn out the servo. Please check the polarity carefully.
Due to friction in the new gears of the gearbox, the servo's operation may produce some noise. This is normal. Please refer to the relevant video to determine if this noise is acceptable.
When the servo cannot rotate to the target position due to being blocked by a load exceeding its torque, causing a servo stall, this is a hazardous condition. While acceptable for short durations, prolonged stalling will keep the motor energized, leading to overheating and ultimately burning out the servo.
Dimensions:(Unit: mm)
Wiring Definition:
Internal wiring of the servo, see the figure below. Description of external signal control modes (RC mode and POT mode):

Physical Image
 |
 |
|---|